In August this year, Lei feng's network in Shenzhen will hold an unprecedented global influence of artificial intelligence and robotics Innovation Conference. When Lei feng's network (search for "Lei feng's network", public interest) will be published "artificial intelligence and robot Top25 list of innovative enterprises". At present, we are visiting related companies in the area of artificial intelligence, robots, sift through them eventually elected to the list list of companies. If you want to join our list, please contact: 2020@leiphone.com.
Lei feng's network: the writer Zhang Yukun/Liu Wei from bupt human-computer and cognition Lab (male: man machine and cognition lab). Path planning is the core of sweeping robot, robot localization and map building for path planning of services, this is to sweep the positioning of robot path planning. See article: sweeping path planning of robot is what to do?

Am sure screen readers should have had the experience of sweeping, think back to sweep the process can be broken down into two main movements: went to a place to clean it. Correspondingly, as a replacement for human sweeping labor--sweep the robot also contains two main systems: autonomous navigation system and cleaning system.
If cleaning system is sweeping the robot dubbed "sweep" of the name of the capital, is to sweep the robot heart; then the autonomous navigation system is dubbed "robot" in the name of energy, is to sweep the robot's brain. If there is no autonomous navigation system, then it can only be called a "sweeping machine" instead of "sweeping robot". Let us look at sweeping robot "CLOUT" is generated.
| Three classic robot navigation problems

Speaking of autonomous robot navigation, in simple terms can be summed up by MIT Professor John j. Leonard and former Sydney University Professor Hugh Durrant-Whyte raised three questions:
(1) Where am I ?

(2) Where I am going?
(3) How should I go there?
The first problem is the robot localization problem, namely how to based on the information now and previously known from observations, determine the robot's position in the current environment. The second and third questions, in fact, is to specify a target, and then plan a path to achieving this goal. For mobile robots in General, this is a point that point-to-point navigation. To sweep the robot, its goal is not to reach a certain point, but traversing a certain area, in order to achieve the cleaning of the room. Today we take a look at the first question, namely sweeping robot localization.
, Including sweeping robot, positioning is the most basic part of autonomous navigation of mobile robots, are also issues that must be resolved to complete a task. When it comes to positioning, we first thought may be the GPS positioning, positioning the base station device, such as an outdoor location. Starbucks iPhone 5 Case
In contrast, sweeping robot localization are indoor positioning, which require high positioning accuracy (at least in sub-meters), real-time, such as GPS and base station positioning methods can not meet. Sweeping robot localization in General can be divided into relative positioning and absolute positioning, we see below.
| Relative positioning method
Dead reckoning method (Dead-Reckoning Method) is a classic method of relative position and sweep the robot is currently the most widely used method of a location. It uses robots equipped with various sensors to obtain dynamic information, obtained by recursive cumulative formula first estimated position of the State. Dead reckoning sensors used are: encoder inertial sensors (such as gyroscopes, accelerometers) and so on.
Coding method using optical encoder mounted on wheels record wheel speed, and obtained in relation to the last sampling time position and attitude change, through the accumulation of these displacements can be estimated robot positions. Encoder advantages are simple and inexpensive, but its easier to calibration errors and to skid, bumps and other factors, large errors. But because disks are cheap, simple to use, and can be used within a short distance of the robot position estimation.
Inertial sensor uses gyroscopes and accelerometers are angular acceleration and the acceleration of information, through the integral access to location information. Under normal circumstances, using the positioning accuracy of inertial sensor above an encoder but its accuracy is also affected by gyro drift, sensitivity calibration errors, and other problems. Whether using disks or the inertial sensors, they all have a common drawback: cumulative errors, with the increasing travel time, distance, error increases. Relative positioning method is not suitable for long distances accurately.
| Absolute positioning method
Absolute location refers to the robot through access to the outside world some known reference information such as location, by calculating the relationship between ourselves and the reference information, and then calculate their own location ... absolute positioning are mainly based on the beacon's position, environment map model match, Visual locating method.
Beacon-based positioning

Beacon position refers to nautical or aviation radio base station radio waves to achieve positioning and navigation technologies. Indoor positioning of the robot, it is a robot through various sensors receive a beacon or observation environment in known locations, calculated relative to the robot and the beacon location into known beacon position coordinate, work out the absolute coordinates of the robot to achieve positioning. Used to locate the beacon must meet 3 criteria:
(1) the beacon position remains constant and the absolute coordinates of the beacon is known;
(2) the beacon has active and passive character, easily identifiable;
(3) the beacon location from observations in all directions.
Beacon positioned mainly trilateration and triangulation. Trilateration is based on the measuring of the robot and the distance to determine the location of mobile robot beacons. Trilateration positioning system transmitter requires at least 3 known locations (or receiver) and receiver (or transmitter) is installed on a mobile robot. The idea of triangulation and trilateration is broadly in line, by measuring the angle between the mobile robot beacons to locate.
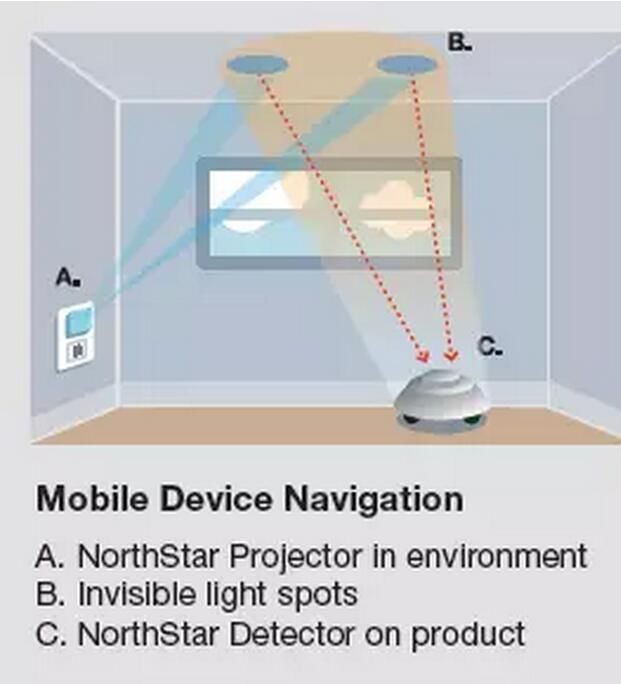
Beacon-based positioning system relies on a series of beacons known features in the environment, and need to install sensors in mobile robot beacons were observed. There are many kinds of sensors for beacon observations, such as Ultrasonic sensors, lidar, vision sensors, and so on. Can measure in real time, no cumulative error, high precision, good stability, provide fast, stable and accurate absolute position information, but installation and maintenance costs are high. Appeared in the market more mature based on positioning beacons beacon positioned to sweep the robot, such as GPS satellite positioning technique for simulating Proscenic, Northstar navigation and positioning technology of iRobot, but because its prices are more expensive, they are used for relatively high-end products.
Environmental map model match
Is the robot through a variety of sensors to detect the surrounding environment, using perceive local maps constructed by local environmental information, and complete Web site stored in advance with map matching. Gained by matching our place in the global environment in order to determine its own position. This method because of the strict conditions, only a few relatively simple environment.

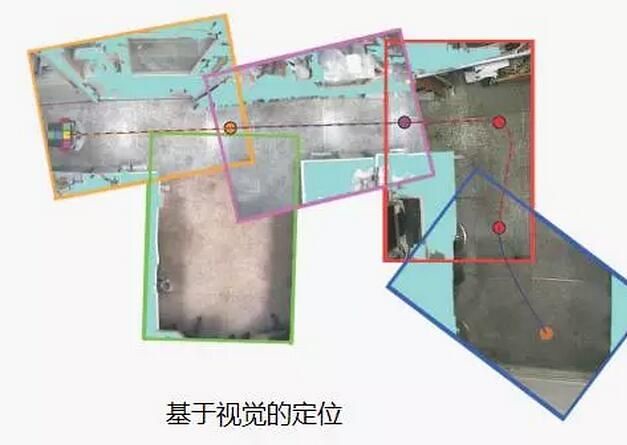
Vision-based localization
Scientific research statistics show that human access to information from the outside world about 75% from the Visual, Visual system are robots and humans perceive the environment closest to the detection methods. Benefit from the development of pattern recognition, machine vision, vision-based robot localization has become a research topic.
Vision-based positioning is divided into monocular, binocular vision.
Three dimensional information of monocular vision cannot be obtained directly, only through the mobile access points in depth information, applicable to the task is relatively simple and the depth of information required is not high, if the geometry of the object model is used, take 3 or more features at the target point can obtain such information, but accuracy is not high. Starbucks iPhone 5 Case
Binocular stereo three-dimensional measurement is based on the principle of Parallax, which left the camera at any point on the image plane as long as they can in the right camera image plane, found on the corresponding matches, you can determine which information to obtain the corresponding three dimensional coordinates of a point.
At present, the sweeping robot based on Visual positioning products have been launched, Dyson and iRobot in 2015, 2014 and the high-end sweeping robot based on Visual positioning RoomBa980 and 360Eye.
| Summary
Independent positioning is to sweep the robot path planning Foundation. After years of study, while constrained by factors such as cost, production, dead reckoning method is still the most widely used method of positioning, but through algorithm optimization using hybrid positioning, to minimise the effect of the error. And with high Visual locating method of positioning accuracy of location further mature, their costs will decrease and gradually from the top end of the market to the mass market, then swept the positioning accuracy of robot, intelligence has generally improved.
Lei Feng network Note: reprints please contact the authorized and retain complete information may not delete, modify articles.
No comments:
Post a Comment